Autonomous Underwater Vehicle (Ocean Engineering Systems Control and Design Project, Spring 2015)
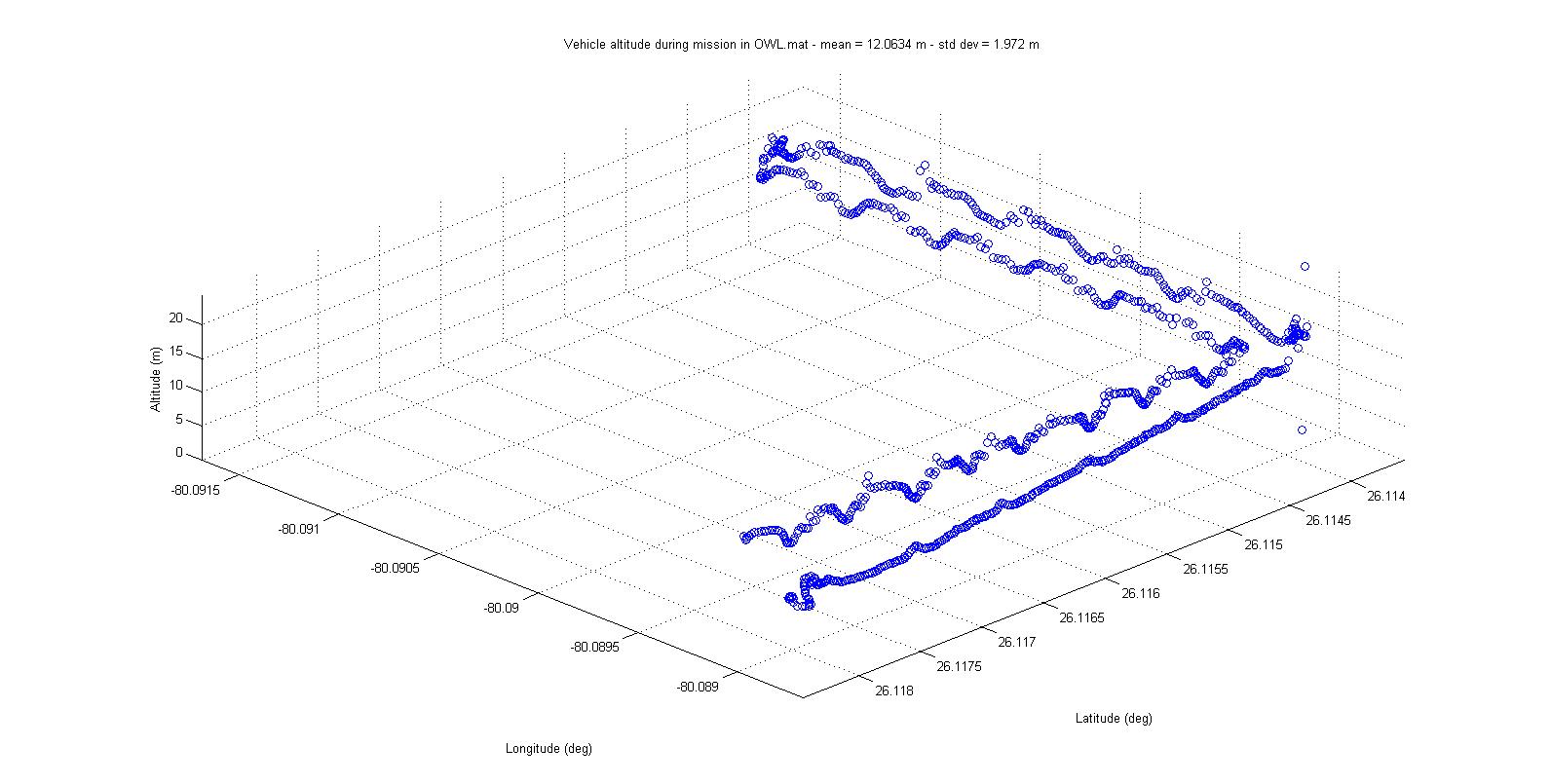
Dietrich was the project manager for a team of Ocean Engineers who designed, built, programmed and tested an underwater vehicle that could traverse autonomously. While underwater the vehicle could navigate a pre-set depth and heading bearing, and/or complete a box pattern underwater. Using common tools and a $2,000.00 budget; this team produced an affordable but capable AUV.
Throughout the project, Dieter held two distinct roles:
Project Manager where his responsibilities were to set a plan over the Fall and Spring semesters to include design, fabrication, programming, and testing of an AUV. He developed weekly reports detailing progress and impediments to the plan. Because of the interdisciplinary position, Dieter acquired coding techniques to validate code developed by the programmers and electrical knowledge to certify printed circuit board plans.

Mechanical lead where he was individually responsible for trade off analysis of design traits and mechanical design justifications that included technical evaluations; such as computational fluid dynamics, finite element analysis, and hand calculations. The design process lead to the fabrication of a modular pressure vessel with control surfaces and a communications mast. Throughout fabrication extensive machining (lathe and mill) as well as 3D printing experience was acquired.
The final report of the project can be seen here